
线性变换与矩阵向量乘积
线性变换 挤压拓展空间
网格线分布仍然是平行且等距分布的 且原点不变
从本质上来讲 这种变换只会对空间的基向量做改变
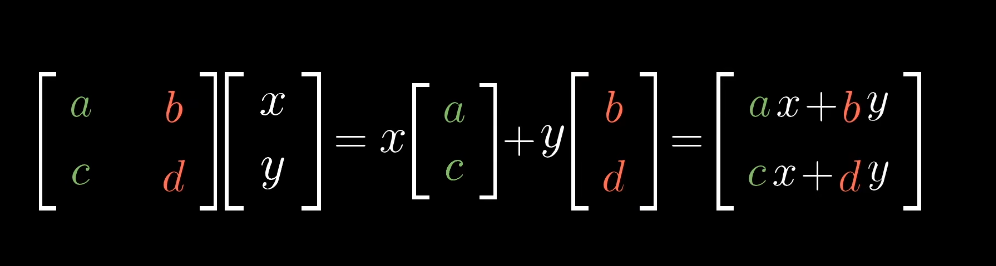
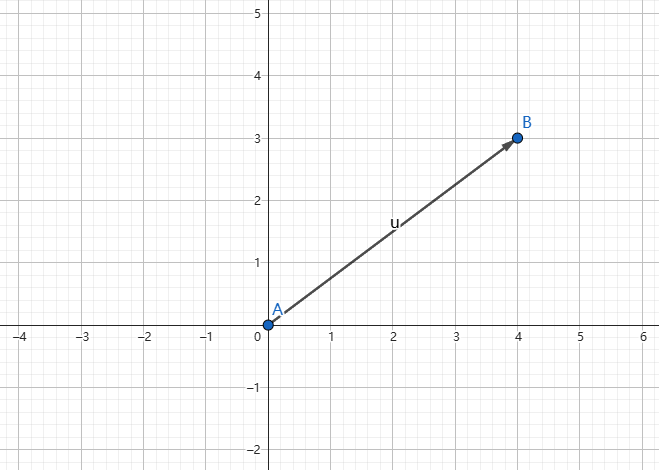
如图 (a,c) 和(b,d)代表 i j 两基向量变换后的坐标表示 (x,y)代表向量坐标
因为网格线分布仍然是平行且等距分布的
所以变换以后的该向量 仍等于 x 倍的 i 向量和 y 倍的 j 向量之和
结果如上
我们把这个计算得出来的过程与结果称之为矩阵向量乘积
即:对坐标系(两基向量)改变后得到的矩阵(变换矩阵)与 原向量 的乘积 == 变换后该向量的坐标表示
它的数学形式如图 但几何意义即上 代表一个矩阵对向量的作用(一个线性变换对向量的作用)
复合变换
顾名思义 即多个变换的叠加作用后形成的变换
做 M1 和 M2 代表的两个变换
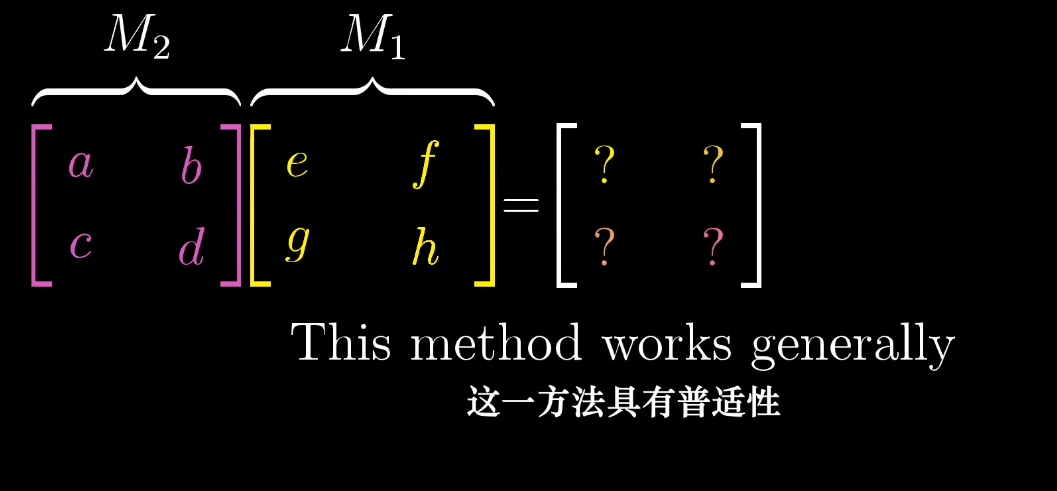
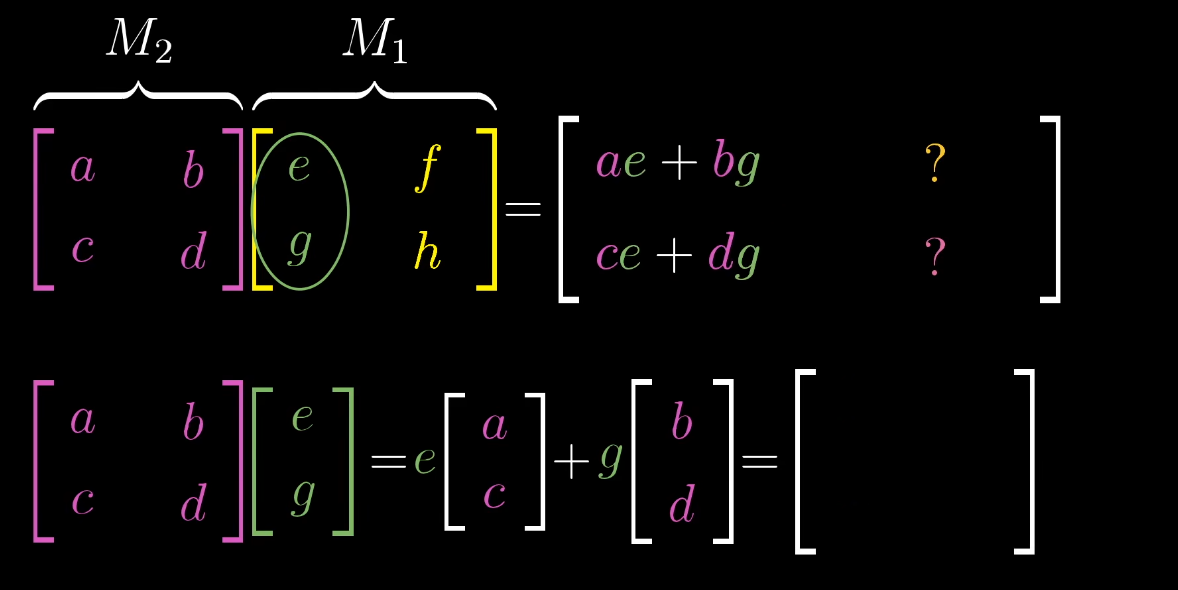
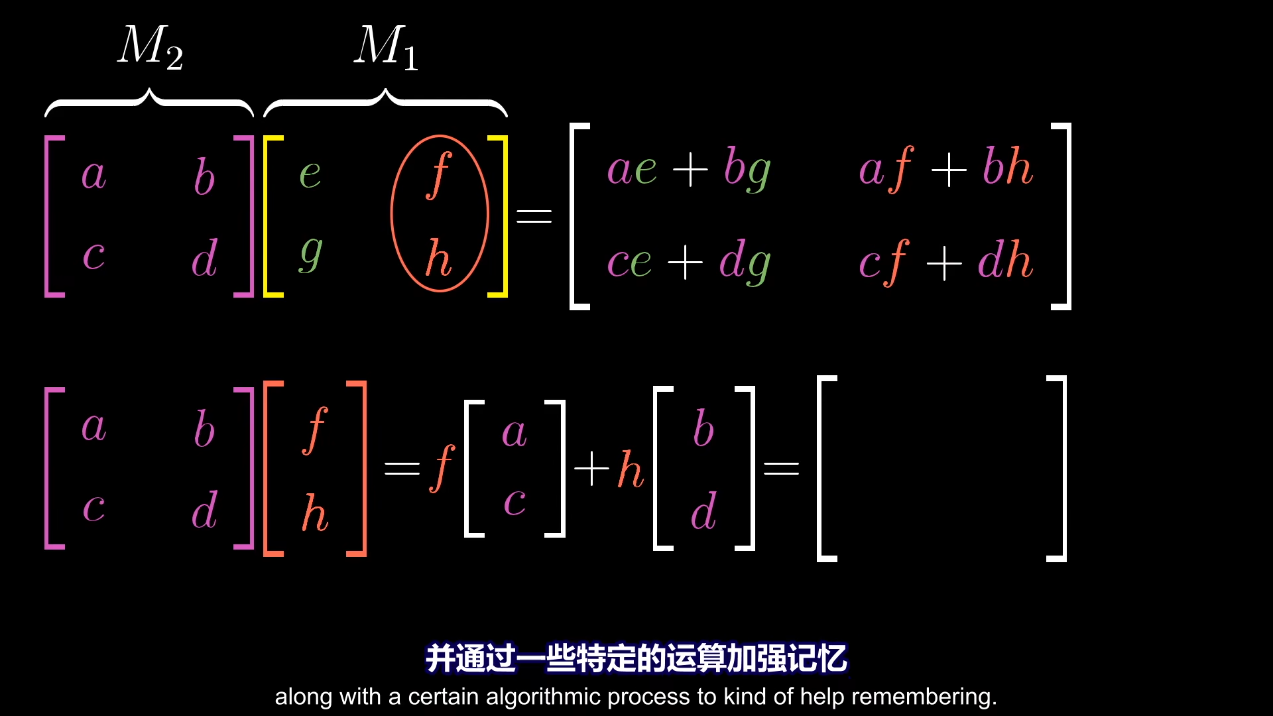
上述运算代表这个过程
对于 M1 矩阵中的基向量 (e , g) 和 (f , h) 我们对它们采用都 M2 代表的线性变换
最终得出的矩阵 M3
即代表这两个矩阵对于基向量的复合作用 数学形式如上
性质:
M1 M2 ≠ M2 M1
(M1 M2)M3 = M1(M2 M3)
更图形学化的理论方面
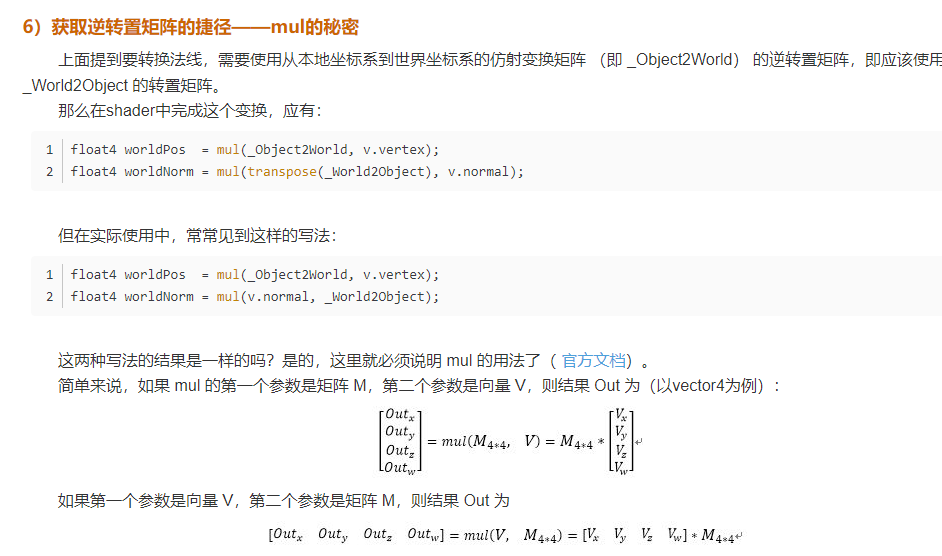
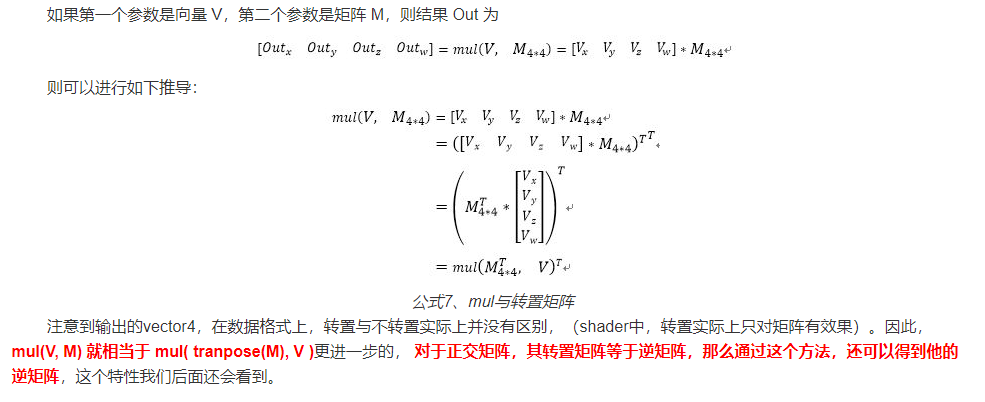
对于法线变换至世界空间
关于 HLSL
首先 HLSL(High-Level Shader Language)默认使用 列主序(Column-Major Order) 来存储矩阵,这意味着:
- 矩阵中的索引
A[i]是矩阵的第 i 列。
例如以下:
(_u_xlat0.xyz = (_u_xlat0.xyz * _u_xlat1.yyy));
(_u_xlat0.xyz = ((_in_TANGENT0.xyz * _u_xlat1.xxx) + _u_xlat0.xyz));
(_u_xlat0.xyz = ((_in_NORMAL0.xyz * _u_xlat1.zzz) + _u_xlat0.xyz));
// 按照某个向量的xyz三个分量标量 对法线 副法线和切线向量进行缩放并加和
// _u_xlat0.xyz = 副法线向量 * _in_TEXCOORD3的y标量 + _in_TANGENT0 * _in_TEXCOORD3的x标量 + _in_NORMAL0* _in_TEXCOORD3的z标量
(_u_xlat1 = (_hlslcc_mtx4x4unity_ObjectToWorld[1].yyyy * _hlslcc_mtx4x4unity_MatrixV[1]));
(_u_xlat1 = ((_hlslcc_mtx4x4unity_MatrixV[0] * _hlslcc_mtx4x4unity_ObjectToWorld[1].xxxx) + _u_xlat1));
(_u_xlat1 = ((_hlslcc_mtx4x4unity_MatrixV[2] * _hlslcc_mtx4x4unity_ObjectToWorld[1].zzzz) + _u_xlat1));
(_u_xlat1 = ((_hlslcc_mtx4x4unity_MatrixV[3] * _hlslcc_mtx4x4unity_ObjectToWorld[1].wwww) + _u_xlat1));
(_u_xlat3.xz = (_u_xlat0.yy * _u_xlat1.xy));
(_u_xlat1 = (_u_xlat1 * _in_POSITION0.yyyy));
(_u_xlat2 = (_hlslcc_mtx4x4unity_ObjectToWorld[0].yyyy * _hlslcc_mtx4x4unity_MatrixV[1]));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[0] * _hlslcc_mtx4x4unity_ObjectToWorld[0].xxxx) + _u_xlat2));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[2] * _hlslcc_mtx4x4unity_ObjectToWorld[0].zzzz) + _u_xlat2));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[3] * _hlslcc_mtx4x4unity_ObjectToWorld[0].wwww) + _u_xlat2));
(_u_xlat0.xy = ((_u_xlat2.xy * _u_xlat0.xx) + _u_xlat3.xz));
(_u_xlat1 = ((_u_xlat2 * _in_POSITION0.xxxx) + _u_xlat1));
(_u_xlat2 = (_hlslcc_mtx4x4unity_ObjectToWorld[2].yyyy * _hlslcc_mtx4x4unity_MatrixV[1]));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[0] * _hlslcc_mtx4x4unity_ObjectToWorld[2].xxxx) + _u_xlat2));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[2] * _hlslcc_mtx4x4unity_ObjectToWorld[2].zzzz) + _u_xlat2));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[3] * _hlslcc_mtx4x4unity_ObjectToWorld[2].wwww) + _u_xlat2));
(_u_xlat0.xy = ((_u_xlat2.xy * _u_xlat0.zz) + _u_xlat0.xy));
(_u_xlat1 = ((_u_xlat2 * _in_POSITION0.zzzz) + _u_xlat1));
// _u_xlat1顶点坐标从世界空间到相机空间(非裁剪)
(_u_xlat0.z = 0.001);
(_u_xlat6 = dot(_u_xlat0.xyz, _u_xlat0.xyz));
(_u_xlat6 = rsqrt(_u_xlat6));
(_u_xlat0.xy = (vec2_ctor(_u_xlat6) * _u_xlat0.xy));
(_u_xlat2 = (_hlslcc_mtx4x4unity_ObjectToWorld[3].yyyy * _hlslcc_mtx4x4unity_MatrixV[1]));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[0] * _hlslcc_mtx4x4unity_ObjectToWorld[3].xxxx) + _u_xlat2));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[2] * _hlslcc_mtx4x4unity_ObjectToWorld[3].zzzz) + _u_xlat2));
(_u_xlat2 = ((_hlslcc_mtx4x4unity_MatrixV[3] * _hlslcc_mtx4x4unity_ObjectToWorld[3].wwww) + _u_xlat2));
(_u_xlat1 = ((_u_xlat2 * _in_POSITION0.wwww) + _u_xlat1));视图矩阵只改变顶点的坐标表示,但顶点之间的相对位置和形状保持不变:
对象空间(Object Space / Model Space)
坐标含义:
- 顶点坐标相对于模型的本地坐标系。
- 通常,模型的原点
(0, 0, 0)是模型的几何中心或一个定义的基准点。 - 没有经过任何变换,是模型在未移动、旋转或缩放时的原始坐标。
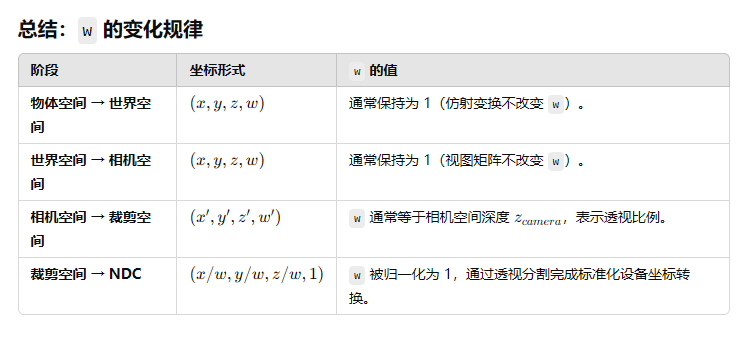
(x, y, z, w) 的意义:
(x, y, z):顶点的本地位置。w = 1:表示这是一个位置(非方向)。
世界空间(World Space)
坐标含义:
- 顶点坐标相对于场景的全局坐标系。
- 通过 模型矩阵(Model Matrix) 将对象空间的坐标变换为世界空间坐标。
- 世界空间定义了所有对象的统一坐标系,通常场景的原点
(0, 0, 0)是世界的基准点。
(x, y, z, w) 的意义:
(x, y, z):顶点在世界坐标系中的位置。w = 1:表示这是一个位置。- 如果是法线等方向性数据,
w = 0(方向向量没有平移分量)。
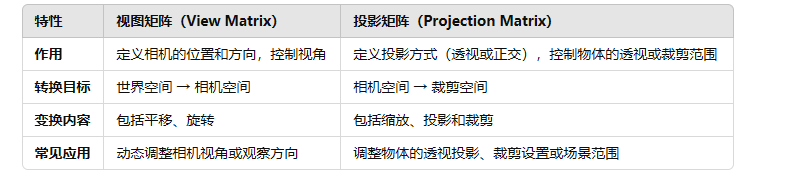
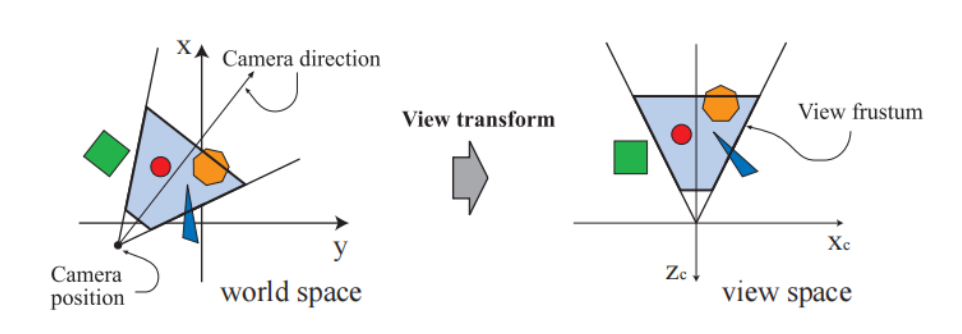
视图空间(View Space / Camera Space / Eye Space)
坐标含义:
- 顶点坐标相对于摄像机的位置和方向。
- 通过 视图矩阵(View Matrix) 将世界空间的坐标变换到视图空间。
- 在视图空间中,摄像机位于原点
(0, 0, 0),朝向 -Z 轴。
(x, y, z, w) 的意义:
(x, y, z):顶点相对于摄像机的方向和距离。z的值表示顶点与摄像机的距离,通常用于深度测试。
w = 1:表示这是一个位置。- 视图空间的坐标以相机(观察者)为中心,表示物体相对于相机的位置。
- z 的值表示顶点离相机的距离:
- 如果 z<0,说明物体在相机的前方(可见)。
- 如果 z>0,则物体在相机的后方(不可见)。
裁剪空间(Clip Space)
坐标含义:
- 顶点经过 投影矩阵(Projection Matrix) 变换后,从视图空间转换到裁剪空间。
- 裁剪空间是一个 4D 空间,坐标范围是
[-w, w],在透视投影中保留深度信息。 - 坐标的范围将在光栅化阶段被裁剪到视锥体内部。
(x, y, z, w) 的意义:
(x, y, z):经过投影变换后的坐标。xyz都是顶点在经过矩阵空间变换后的坐标w:用于透视除法(将裁剪空间坐标转换为归一化设备坐标)。
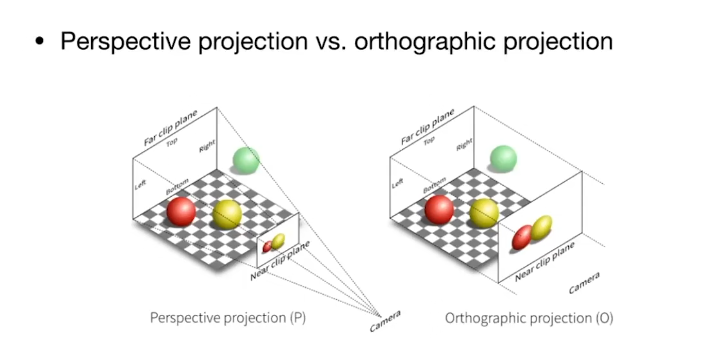
对于正交投影
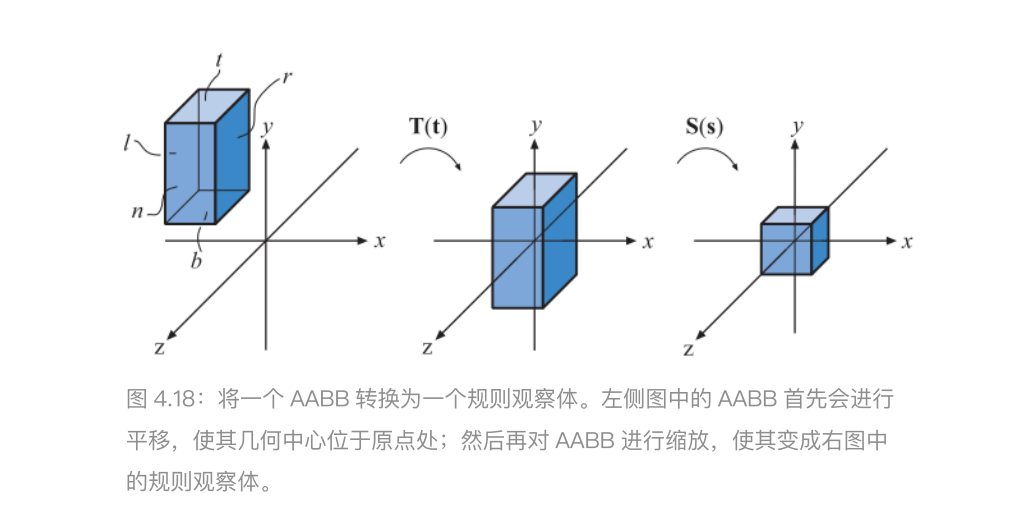
正交投影矩阵
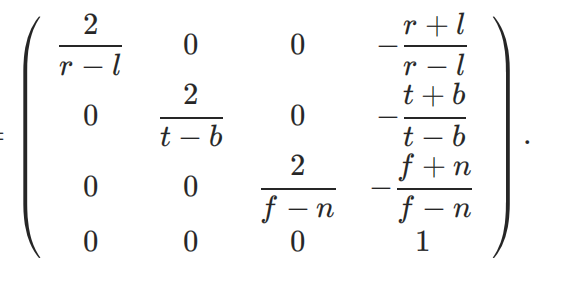
这是一个复合矩阵 C = AB B 代表缩放矩阵 A 代表转移矩阵
视图空间坐标经过正交投影矩阵变换后 w 值仍然不变 = 1 而 xyz 直接表示它在规则观察体下的坐标
也就是说可以 直接按照此时的 (x, y, z) 是否位于 -1 到 1 进行裁剪
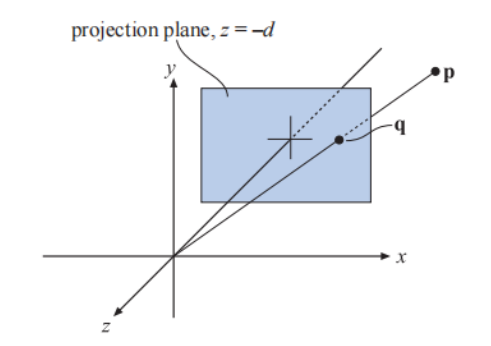
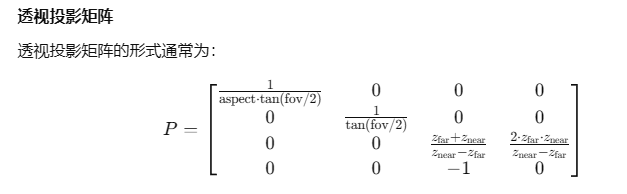
对于透视投影
透视投影矩阵
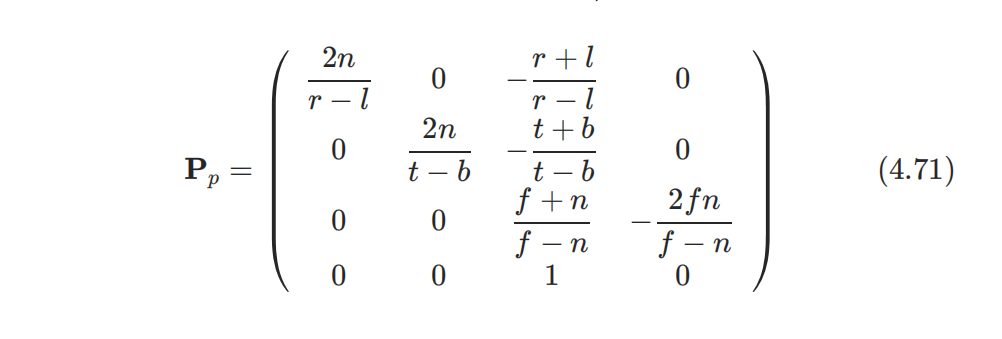
这之后的坐标 视图空间坐标经过正交投影矩阵变换后 (x,y,z,w) 仍然是齐次坐标
孩子们 投影矩阵这个说法好像是不准确的
实际上 投影矩阵处理后的坐标 P’ 只是转换空间后的坐标 而不是投影操作后的坐标
此时的 w 代表相机空间下的 z 坐标 表示其深度
而 xyz 三个坐标表示分别被缩放后的坐标值
- 如果一个顶点在视锥体内,那么它变换后的坐标必须满足:
-w ≤ x ≤ w-w ≤ y ≤ w-w ≤ z ≤ w - 也就是除以 w 后
-1 ≤ x ≤ 1-1 ≤ y ≤ 1-1 ≤ z ≤ 1这样的点才位于规则观察体的内部
综上所示 投影矩阵有两个目的:
- 首先是为投影做准备。这是个迷惑点,虽然投影矩阵的名称包含了投影二字,但是它并没有进行真正的投影工作,而是在为投影做准备。真正的投影发生在后面的齐次除法(homogeneous division)过程中。而经过投影矩阵的变换后,顶点的 w 分量将会具有特殊的意义。
- 其次是对 x、 y、 z 分量行进缩放。我们上面讲过直接使用视锥体的6个裁剪平面来进行裁剪会比较麻烦。而经过投影矩阵的缩放后,我们可以直接使用 w 分量作为一个范围值,如果 x、 y、 z 分量都位于这个范围内,就说明该顶点位于裁剪空间内。
所以 实际上的投影操作在下面这步 NDC 中完成 真正实现把三维物体转变为二维图像
归一化设备坐标(Normalized Device Coordinates, NDC)
坐标含义:
- 通过 透视除法(将裁剪空间坐标除以
w)将坐标转换到一个标准化的范围。 - 归一化设备坐标范围为
[-1, 1]。
(x, y, z, w) 的意义:
(x, y):表示屏幕上的横纵坐标范围,[-1, 1]映射到屏幕像素的整个范围。z:表示深度值,通常在[0, 1](有时为[-1, 1]取决于图形 API)。w不再被使用。
为什么在顶点着色器中 position 对应的 buffer 数要比实际的几何顶点数多很多?
(Reference to external note: [[为什么在顶点着色器中 position对应的buffer 数要比实际的几何顶点数多很多?]] - Content pending)
片元着色器如何依赖顶点着色器
片元着色器依赖顶点着色器的输出,但它并不直接运行在顶点上,而是运行在光栅化后生成的片元上。
插值过程:
- 顶点着色器输出的每个顶点属性(如颜色、纹理坐标)会经过光栅化阶段进行插值。
- 插值使用三角形内片元的 重心坐标(Barycentric Coordinates):
属性值 = w1 * 属性1 + w2 * 属性2 + w3 * 属性3
其中:
w1, w2, w3是片元在三角形内的重心坐标权重。属性1, 属性2, 属性3是三角形顶点的属性值(来自顶点着色器)。
片元着色器的输入:
- 片元着色器接收到插值后的属性值,并使用它们计算片元的颜色。
| 阶段 | 运行对象 | 运行次数 |
|---|---|---|
| 顶点着色器 | 每个顶点 | 等于索引缓冲区的长度(顶点数)。 |
| 片元着色器 | 每个片元(像素) | 等于屏幕上被三角形覆盖的像素数(片元数)。 |
OpenGL vs DirectX 转换与兼容性
VS_OUTPUT generateOutput(VS_INPUT input)
{
VS_OUTPUT output;
output.gl_Position = gl_Position;
output.dx_Position.x = gl_Position.x;
output.dx_Position.y = clipControlOrigin * gl_Position.y;
if (clipControlZeroToOne)
{
output.dx_Position.z = gl_Position.z;
} else {
output.dx_Position.z = (gl_Position.z + gl_Position.w) * 0.5;
}
output.dx_Position.w = gl_Position.w;
return output;
}一些奇怪的矩阵
hlslcc_mtx4x4_XShadowWorldToProj
将顶点坐标从世界空间转换到光源投影空间,通常用于阴影映射技术中计算阴影坐标。